Registre. Posuvný register Princíp činnosti posuvného registra
1. Obsah
2. Úvod ……………………………………………………………………………………… 2
3. Prehľad literárnych zdrojov ………………………………… 3
3.1. Všeobecné informácie o registroch ……………………………………… 3
3.2. Všeobecné informácie o spúšťačoch ……………………………….. 6
3.3. Posunové registre ……………………………………….. 12
3.4. Univerzálne registre ………………………………………. 20
4. Vývoj obvodu posuvného registra ………………………………… 24
4.1. Počiatočné údaje ………………………………………………… 24
4.2. Postup pri vývoji posuvného registra ………………………………… 24
4.3. Vývoj štvorfázového posuvného registra ………………………… 25
5. Záver……………………………………………………………. 27
6. Zoznam referencií …………………………………. 28
2. Úvod
Registre– najbežnejšie komponenty digitálnych zariadení. Operujú s mnohými súvisiacimi premennými, ktoré tvoria slovo. So slovami sa vykonáva množstvo operácií: príjem, vydávanie, ukladanie, posúvanie v bitovej mriežke, bitové logické operácie.
Na posun sa používajú posuvné (sekvenčné) registre n-bitové čísla v jednom smere. Okrem toho ich možno použiť na posun nečíselných informácií.
Posuvné registre sa používajú ako pamäťové zariadenia, ako prevodníky sériového kódu na paralelný, ako oneskorovacie zariadenia a počítadlá impulzov (použitie posuvných registrov ako počítadiel je však značne neekonomické).
3. Prehľad literárnych zdrojov
3.1. Všeobecné informácie o registroch
Registre pozostávajú z bitových obvodov, ktoré obsahujú klopné obvody a najčastejšie aj logické prvky. Pôsobia ako jeden celok.
Podľa počtu premenných prenosových vedení sa registre delia na jednofázové a parafázové a podľa systému synchronizácie na jednocyklové, push-pull a viaccyklové. Hlavným klasifikačným znakom je však spôsob prijímania a vydávania údajov. Na tomto základe rozlišujú paralelný (statický) registre, sekvenčný (posunujúci sa) A paralelne-sériový .
V paralelných registroch sa slová prijímajú a vydávajú vo všetkých bitoch súčasne. Ukladajú slová, ktoré môžu byť podrobené bitovým logickým transformáciám.
V sekvenčných registroch sa slová prijímajú a vydávajú číslicu po číslici. Nazývajú sa posúvanie, pretože časovacie signály pri vstupe a výstupe slov ich posúvajú v bitovej mriežke. Posuvný register môže byť nereverzibilný (s jednosmernými posunmi) alebo reverzibilný (so schopnosťou posúvania v oboch smeroch).
Sériovo-paralelné registre majú vstupy a výstupy sériového aj paralelného typu. K dispozícii sú možnosti so sériovým vstupom a paralelným výstupom (SIPO, Serial Input – Parallel Output), paralelný vstup a sériový výstup (PISO, Parallel Input – Serial Output), ako aj možnosti s možnosťou ľubovoľnej kombinácie spôsobov príjmu a výdaja slová.
V paralelných (statických) registroch medzi sebou bitové obvody nekomunikujú. Spoločné pre bity sú zvyčajne obvody hodín, obvody reset/nastavenie, výstup alebo príjem povolenia, teda riadiace obvody. Príklad obvodu statického registra postaveného na klopných obvodoch typu D s priamymi dynamickými vstupmi, ktoré majú resetovacie vstupy R a výstupy tretieho stavu riadené signálom EZ, je znázornený na postava 1 .

Obrázok 1. Schéma statického registra(a) a jeho podmienenosť grafické označenie(b)
Moderná obvodová technika sa vyznačuje konštrukciou registrov na klopných obvodoch typu D, hlavne s dynamickým riadením. Mnohé majú výstupy s tretím stavom. Niektoré registre sú klasifikované ako vyrovnávacie registre, to znamená, že sú navrhnuté na prácu s veľkými kapacitnými a/alebo nízkoodporovými aktívnymi záťažami. Tým je zabezpečená ich prevádzka priamo na diaľnici (bez dodatočných obvodov rozhrania).
Statické registre sa používajú na vytváranie blokov pamäte registrov – súborov registrov.
Hlavné funkcie registrov:
1) Ukladanie informácií,
2) Príjem informácií,
3) poskytovanie informácií,
4) Posun informácií,
5) konverzia kódu,
6) Nastavenie požadovaného čísla na nulu alebo jednotku,
7) Bitové logické operácie: disjunkcia, konjunkcia, sčítanie modulo 2.
3.2. Pochopenie spúšťačov
Spúšťače – veľká trieda elektrické zariadenia, čo mu umožňuje dlhodobo zotrvávať v jednom z dvoch (alebo viacerých) stabilných stavov a striedať ich pod vplyvom vonkajších signálov (ako výsledok regeneračného procesu (proces prechodu v elektrický obvod, na ktoré sa vzťahuje PIC)).
Spúšťač je pulzné logické zariadenie s pamäťou (pamäťový prvok – západka).
Existuje viac ako tucet rôznych integrálnych spúšťačov. Ich klasifikácia je založená na:
Funkčný znak
Metóda zapisovania informácií do spúšťača.
Na základe ich funkčných charakteristík sa rozlišujú T-triggery, JK-triggers, RS-triggers, D-triggers, kombinované spúšťače (TV, DV, E, R) atď.
Podľa spôsobu zaznamenávania (prijímania) informácií sa rozlišujú:
8) Asynchrónne spúšťače:
a) s vnútorným oneskorením;
b) riadené úrovňou vstupného impulzu;
9) Synchrónne spúšťače (taktované):
a) s vnútorným oneskorením;
b) riadené úrovňou časovacieho impulzu:
Jednocyklová akcia (jednostupňová);
Viacnásobná akcia.
Informácie sa zapisujú do taktovaných spúšťačov iba vtedy, keď je aplikovaný aktivačný hodinový impulz. Takéto spúšťače sa delia na úroveň riadené (pre činnosť je potrebná určitá úroveň signálu) a hranové (nezávisia od úrovne signálu, dôležitá je jeho prítomnosť) časovacieho impulzu. Hodinové impulzy sa niekedy nazývajú aj synchronizačné, výkonné alebo príkazové signály (v diagramoch sa zvyčajne označujú písmenom C - Clock).
Ovládanie spodnej úrovne časovacieho impulzu:
Taktované spúšťače s vnútorným oneskorením (spúšťané po skončení signálu) sú spravidla jednostranné. Viaccyklový spúšťa požiar po n- nogo impulz.
Spúšťač RS má dva informačné vstupy: S (Set) a R (Reset). Súčasná aplikácia signálov S a R nie je povolená. Zapnuté Obrázok 2 ukazuje synchrónne spúšťanie RS spúšťané okrajom časovacieho signálu.

Obrázok 2 Synchrónna spúšť RS
Najjednoduchšia spúšť RS má okrem vstupov aj dva výstupy. Výstupy naznačujú Q A
. VÝCHOD Q nazývané priame, a - inverzné. Úrovne napätia na oboch výstupoch sú vzájomne inverzné: ak je signál Q= 1, potom = 0, alebo ak Q= 0, potom = 1. Treba tiež poznamenať, že stav spúšťača, v ktorom Q= 1, a = 0, sa nazýva jednotka. Keď je spúšť nulová Q= 0 a = 1. Pri príchode signálov na vstupy spúšte v závislosti od jej stavu buď dôjde k prepnutiu alebo sa zachová pôvodný stav.
Obrázok 3. - spúšť: jej konvenčné grafické označenie a obvod s dvoma logickými prvkami AND-NOT
Táto recenzia je v skutočnosti venovaná začínajúcim používateľom Arduina alebo tým, ktorí sa chcú zapojiť do tohto podnikania. Budeme sa baviť o zvýšení počtu výstupov mikrokontroléra pomocou posuvného registra a to si nevyžaduje veľké výdavky (napríklad v porovnaní s kúpou Arduina Mega). Najjednoduchšia aplikácia je blikanie LED diód, tak si to skúsme v praxi.
Keď som sa začal zoznamovať s mikrokontrolérmi (v skutočnosti stále pokračujem v „zoznamovaní“), jedna z prvých otázok bola: ako môžete ovládať tých istých sto tisíc LED diód iba s tuctom výstupov na ovládači? Áno, môžete použiť multiplexovanie signálu, protizapojenie a mnoho ďalších trikov, ale aj tak je maximálny počet pripojených LED obmedzený a je potrebné hľadať iné riešenie. A navrhli mi jednu z možností – „vezmite si jeden, dva, desať čipov posuvného registra a bavte sa“. Bolo rozhodnuté okamžite si ich objednať a v budúcnosti z nich dokonca zostaviť LED kocku. To posledné som naozaj musel opustiť; našiel som jednoduchšiu možnosť, ale toto je téma inej recenzie.
Objednal som si naraz 20 kusov 74HC595N, našťastie stáli len centy. Písmeno N na konci označenia znamená, že mikroobvod je v balení DIP-16, čo je veľmi výhodné pre experimenty na doske, nemusíte ani nič spájkovať. Vyzerá to takto: 

Čo je to za mikroobvod? Ide o osembitový posuvný register so sériovým vstupom, sériovým výstupom alebo paralelným výstupom so západkovým klopným obvodom a trojstavovým výstupom.
Jednoducho povedané, pomocou iba 3 výstupov ovládača môžete ovládať 8 výstupov posuvného registra. A ak sú mikroobvody zapojené do série za sebou, tak sa počet ovládaných výstupov môže zvýšiť na akúkoľvek rozumnú hranicu (maximálny počet som nenašiel, ale stovky sa zdajú byť bez problémov skombinované; ak niekto vie, aký je max. počet mikroobvodov zahrnutých v kaskáde závisí od, bolo by zaujímavé zistiť v komentároch).
Dáta sa prenášajú na čip sériovo. Bity 0 a 1 sa prenášajú do registra jeden po druhom, bity sa čítajú pri príchode hodinového impulzu. Prenesených 8 bitov - prijatých 8 výstupných stavov na výstupoch registra. Keď je 74HC595 kaskádovaný (ak je potrebných 16, 24 atď. výstupov), dáta z prvého registra sa prenesú do ďalšieho.
Výstup registra môže byť nielen v stave logickej 0 alebo 1, ale môže byť aj v stave vysokej impedancie, keď je výstup odpojený od obvodu. Do tohto stavu je možné naraz preniesť len všetky výstupy. Toto sa používa zriedka, ale môže byť užitočné napríklad pri prepínaní ovládania na iný ovládač.
Vstupný/výstupný pinout 
Q0…Q7 – výstupy registra, môžu byť v stave 0, 1 alebo vysokej impedancii
GND – zem
Q7′ – výstup pre sériové pripojenie registrov.
MR – reset registra
SH_CP – hodinový vstup
ST_CP – dátový latching vstup
OE – vstup konvertujúci výstupy z vysokej impedancie do prevádzkového stavu
DS – zadávanie údajov
VCC – napájanie 2-6 voltov
Zostáva len skontrolovať prácu, aby sme to urobili, zostavíme okruh, ktorý je obľúbený medzi začiatočníkmi. GND (pin 8) je pripojený k zemi, Vcc (pin 16) k 5V napájaniu, OE (pin 13) k zemi, MR (pin 10) k 5V napájaniu. Posuvný register je teraz zapnutý a všetky výstupy sú aktívne. Teraz je čas pripojiť mikroobvod k Arduinu: pripojte dátový vstup DS (pin 14) k 9. digitálnemu výstupu Arduina, vstup hodín SH_CP (pin 11) k 10. digitálnemu výstupu, vstup ST_CP latch (pin 12 ) na 8. pin Arduino. Odporúča sa umiestniť medzi zem a západku 0,1 µF kondenzátor, aby sa minimalizoval šum.
Zostáva pripojiť LED - cez odpory 150-300 Ohm ich pripojíme z výstupov registra k zemi. To je všetko. Tu je diagram, ktorý som našiel pre tých, ktorí majú radi vizuálne materiály (upozorňujeme, že pinout skutočného mikroobvodu a schematický obrázok na tomto diagrame sú odlišné!) 
Zostavil som obvod na doštičku a dopadlo to takto.
zostavený obvod




V Arduine je vhodné použiť funkciu shiftOut(), ktorá postupne (bit po bite) vydáva bajt informácie na vstupno/výstupný port. . Načítame testovací kód do Arduina a získame počítadlo od 0 do 255 v binárnej forme:
int latchPin = 8; //ST_CP int clockPin = 10; //SH_CP int dataPin = 9; //DS void setup() ( pinMode(latchPin, OUTPUT); pinMode(clockPin, OUTPUT); pinMode(dataPin, OUTPUT); ) void loop() ( for (int numberToDisplay = 0; numberToDisplay< 256; numberToDisplay++) { // установка синхронизации "защелки" на LOW digitalWrite(latchPin, LOW); // передаем последовательно на вход данных shiftOut(dataPin, clockPin, MSBFIRST, numberToDisplay); //"защелкиваем" регистр, устанавливаем значения на выходах digitalWrite(latchPin, HIGH); delay(500); } }
Takto sa mi to stalo, všetko funguje podľa očakávania:
S minimálnym použitím kolíkov ovládača teda môžete ovládať veľké množstvo LED diód (alebo niečo iné). Všetko by bolo v poriadku, ale poviem vám aj o nedostatkoch. Ako vidíte, prúd pre každú LED musí byť obmedzený odporom a pri vytváraní veľkých matíc LED je to dosť náročné na prácu. Je ich viac zaujímavé riešenie na ovládanie LED - driver DM13A, ktorý je posuvným registrom a zároveň obmedzuje prúd na každom výstupe. O tom vám poviem nabudúce a ako bonus - moja úplne prvá LED kocka, 5x5x5, zostavená na zjednodušenej základni prvkov, bez použitia 74HC595.
Plánujem kúpiť +37 Pridať k obľúbeným Recenzia sa mi páčila +35 +61
Posuvný register klopného obvodu je súbor klopných obvodov s určitými spojeniami medzi nimi, v ktorých fungujú ako jediné zariadenie. Sekvenčné (posunovacie) registre sú reťazou bitových obvodov spojených prenosovými obvodmi.
V jednocyklových registroch s jednobitovým posunom doprava (obrázok 7) sa slovo posunie pri prijatí synchronizačného signálu. Vstup a výstup sú sériové (DSR - Data Serial Right). Na obrázku 8 je znázornený obvod registra s posunom doľava (vstup dát DSL - Data Serial Left) a na obrázku 9 je znázornený princíp konštrukcie reverzného registra, v ktorom sú spojenia medzi klopnými obvodmi s oboma susednými bitmi, ale zodpovedajúce signály umožňujú iba činnosť jedného z týchto spojení (príkazy „vľavo“ a „vpravo“ sa nedávajú súčasne).
Obrázok 7. Obvod registra s posunom doprava

Obrázok 8. Obvod ľavého posuvného registra

Obrázok 9. Obvod reverzného registra
Podľa požiadaviek na synchronizáciu v posuvných registroch, ktoré nemajú logické prvky v medzibitových spojeniach, nie je možné použiť jednostupňové klopné obvody riadené úrovňou, pretože niektoré klopné obvody sa môžu opakovane prepínať počas pôsobenia povoľovacej úrovne. hodinový signál, čo je neprijateľné. V týchto schémach by sa mali používať spúšťače s dynamickým ovládaním (dvojstupňové).
Vzhľad logických prvkov a navyše logických obvodov nejednotkovej hĺbky v medzibitových spojeniach zjednodušuje plnenie prevádzkových podmienok registrov a rozširuje škálu typov klopných obvodov vhodných pre tieto obvody.
Viaccyklové posuvné registre sú riadené niekoľkými hodinovými sekvenciami. Z nich sú najznámejšie push-pull s hlavnými a doplnkovými registrami, postavené na jednoduchých jednostupňových spúšťačoch ovládaných levelom. Na hodinách C1 sa obsah hlavného registra prepíše do doplnkového registra a na hodinách C2 sa vráti do hlavného registra, ale na susedné bity, čo zodpovedá slovnému posunu. Z hľadiska nákladov na vybavenie a výkonu sa táto možnosť blíži k jednocyklovému registru s dvojstupňovými klopnými obvodmi.
Posuvný register obsahuje sadu klopných obvodov s určitými spojeniami medzi nimi a organizácia týchto spojení je taká, že pri aplikácii hodinového impulzu, spoločného pre všetky klopné obvody, sa výstupný stav každého klopného obvodu posunie na ten susedný. V závislosti od organizácie spojení môže tento posun nastať doľava alebo doprava:
Shift doľava
Shift doprava
Je možné zadať informácie do registra rôzne cesty, najčastejšie sa však používa paralelný alebo sériový vstup, pri ktorom sa binárne číslo zadáva buď súčasne do všetkých bitov registra, alebo postupne v čase po jednotlivých bitoch. V impulzných počítadlách sa používajú posuvné registre so sekvenčným vstupom a výstupom informácie a s posunom doprava. Obrázok 10a zobrazuje schému štvorbitového posuvného registra vytvoreného na RS klopných obvodoch. V tomto obvode je každý výstup Q klopného obvodu pripojený k vstupu S nasledujúcej číslice a každý výstup je pripojený k vstupu R. Hodinové vstupy všetkých klopných obvodov sú spojené dohromady a synchronizačný signál je prijaté jedným spoločným impulzom cez bránu NAND (DD7). Stav prvého spustenia je určený vstupnými signálmi na vstupoch X1, X2 logického prvku AND-NOT (DD5). Aktuálne informácie sa privádzajú na vstup X1 a signál umožňujúci ich prenos na vstup X2. Hradlo NOT (DD6) sa používa na invertovanie vstupného signálu privedeného na vstup S.
Obrázok 10b ukazuje časové diagramy výstupných signálov spúšťačov a stav registrov pri zápise jedného signálu na prvú číslicu. Ak sa po príchode prvého hodinového impulzu nastavia na vstupoch X1 a X2 signály X1 = X2 = 1, ktoré sa potom príchodom druhého hodinového impulzu odstránia, potom bude signál Q1 = 1 Po príchode druhého hodinového impulzu sa pri prvom spustení zaznamená signál Q1 = 0 a na výstupe druhého spúšťača sa objaví signál Q2 = 1, ktorý bol predtým na výstupe druhý spúšťač. Keď prídu následné hodinové impulzy, jeden signál sa postupne presunie do tretieho a štvrtého klopného obvodu, po ktorom sa všetky klopné obvody nastavia do nulového stavu.


Obrázok 10. Schéma štvorfázového posuvného registra, časové diagramy jeho signálov a stavy registra pri zápise jedného signálu na prvú číslicu
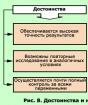
Posuvné registre je možné realizovať aj pomocou klopných obvodov D alebo klopných obvodov JK. Všetky posuvné registre majú nasledujúce ustanovenia:
- 1) je potrebné vopred nastaviť počiatočný stav a zadať jednotku do prvého spúšťača
- 2) pre register n klopných obvodov je po príchode n vstupných hodinových impulzov na výstupe pôvodne zadaná jednotka, v dôsledku čoho sú priame výstupy všetkých registrov v nulovom stave.
Integrované čipy posuvného registra sú reverzibilné, to znamená, že vykonávajú posun v akomkoľvek smere: doľava alebo doprava. Smer posunu je určený hodnotou riadiaceho signálu.

Obrázok 11. Implementácia posuvného registra na klopných obvodoch RS s jedným zakončením
Sériový posuvný register má dve nevýhody: umožňuje zadať iba jeden bit informácie na každý hodinový impulz a navyše pri každom posunutí informácie v registri doprava sa stratí informačný bit úplne vpravo. Obrázok 12 zobrazuje systém, ktorý umožňuje súčasné paralelné načítanie 4 bitov informácií.

Obrázok 12. Bloková schéma 4-bitového paralelného registra
Vstupy 1, 2, 3, 4 v tomto zariadení sú informačné vstupy. Tento systém môže byť vybavený ďalšou užitočnou charakteristikou – možnosťou kruhového pohybu informácií, kedy sa dáta z výstupu zariadenia vracajú na jeho vstup a nestrácajú sa.

Obrázok 13. Logická schéma štvorbitového paralelného kruhového registra
Obvod 4-bitového paralelného kruhového posuvného registra je znázornený na obrázku 13. V tomto posuvnom registri sú použité štyri JK klopné obvody. Vďaka spätnej väzbe budú informácie vložené do registra, ktoré sa zvyčajne stratia na výstupe štvrtého klopného obvodu, cirkulovať cez posuvný register. Signál na vymazanie registra (nastavte jeho výstupy do stavu 0000) je logická úroveň 0 na vstupe CLR. Paralelné vstupy dátového zaťaženia 1, 2, 3 a 4 sú pripojené k prednastaveným (PS) vstupom spúšťania, čo umožňuje nastaviť logickú 1 na ľubovoľnom výstupe (1, 2, 3, 4). Ak sa na jeden z týchto vstupov čo i len krátko privedie logická 0, potom sa na príslušnom výstupe nastaví logická 1. Aplikovanie hodinových impulzov na C vstupy všetkých JK klopných obvodov vedie k posunu informácie v registri do správny. Od štvrtého spúšťača sa dáta prenášajú do prvého spúšťača (kruhový pohyb informácií).
|
Linka č. |
||||||||||
|
Hodiny č. |
||||||||||
Princíp činnosti paralelného posuvného registra je opísaný v tabuľke 1. Po zapnutí napájania je možné na výstupoch registra nastaviť ľubovoľnú binárnu kombináciu, ako napríklad v riadku 1 tabuľky. Aplikácia logickej 0 na vstupy klopných obvodov CLR spustí vymazanie registra (riadok 2). Ďalej (riadok 3) sa do registra nahrá binárna kombinácia 0100. Po sebe idúce hodinové impulzy spôsobia posun zadávanej informácie doprava (riadky 4 - 8). V riadkoch 5 a 6: jeden z klopného obvodu úplne vpravo (štvrtý) sa prenesie do klopného obvodu úplne vľavo (prvý). V tomto prípade môžeme hovoriť o kruhovom pohybe jednotky v registri. Ďalej (riadok 9) sa opäť spustí vymazanie registra pomocou vstupu CLR. Načíta sa nová binárna kombinácia 0110 (riadok 10). Aplikácia 5 hodinových impulzov (riadky 11-15) má za následok kruhový posun informácií o 5 pozícií doprava. Na vrátenie údajov do pôvodného stavu sú potrebné 4 hodinové impulzy.
Ak prerušíme spätnú väzbu v posuvnom registri na obrázku 13, dostaneme pravidelný paralelný posuvný register: vylúči sa možnosť kruhového pohybu informácií.


Obrázok 14. Trojcyklový posuvný register na klopných obvodoch RS
Na konštrukciu registrov sa používa sekvenčné spojenie týchto prvkov.
Sériový register (posuvný register alebo posuvný register) sa zvyčajne používa na prevod sériového kódu na paralelný kód a naopak. Použitie sériového kódu je spojené s potrebou prenášať veľké množstvo binárnych informácií cez obmedzený počet spojovacích liniek. Pri paralelnom prenose výbojov je potrebný veľký počet spojovacích vodičov. Ak sa binárne bity prenášajú postupne, bit po bite, cez jeden vodič, potom sa veľkosť spojovacích vedení na doske (a veľkosť balíkov čipov) môže výrazne znížiť.
Schematický diagram sériového (posunového) registra, zostaveného na základe a umožňujúceho konverziu sériového kódu na paralelný, je znázornený na obrázku 1. Upozorňujeme, že ak oba spúšťače založené na potenciáli (spúšťače západky) a spúšťače fungujúce na hrane , potom sú na implementáciu sekvenčného (posunového) registra vhodné len D klopné obvody pracujúce na hrane!
Obrázok 1. Obvod sekvenčného (posunového) registra
Vo vnútri posuvného registra sú klopné obvody zapojené do série, to znamená, že výstup prvého je spojený so vstupom druhého atď. Uvažovaný sériový register je znázornený na obrázku 2.

Obrázok 2. Grafické označenie sekvenčného (posunového) registra
Hodinové vstupy v sériových (posunových) registroch, ako aj v paralelných registroch sú kombinované. Tým je zabezpečená súčasná zmena stavu všetkých klopných obvodov zahrnutých v sekvenčnom (posunovom) registri.
Konverzia sériového kódu na paralelný v sériovom (posunovom) registri sa vykonáva nasledovne. Jednotlivé bity binárnej informácie sa postupne privádzajú na vstup posuvného registra D0. Každý bit je sprevádzaný samostatným hodinovým impulzom, ktorý je privedený na hodinový vstup sériového registra C.
Po príchode prvého hodinového impulzu sa logická úroveň prítomná na vstupe D0 uloží do prvého spúšťača sériového (posunového) registra a prejde na jeho výstup, a keďže je pripojený na vstup druhého klopného obvodu, aj na jeho vstup. Ak by bol sériový (posunovací) register zostavený na D klopných obvodoch pracujúcich podľa potenciálu, potom by sa tento bit okamžite zapísal do druhého D klopného obvodu! V našom prípade sa tak nestane, pretože v tomto momente už hrana na hodinovom vstupe C skončila.
Po príchode druhého hodinového impulzu sa v ňom uloží logická úroveň prítomná na vstupe druhého spúšťača sériového (posunového) registra a ide na jeho výstup a keďže je pripojený na vstup tretieho klopného obvodu, aj na jeho vstup. Zároveň je nasledujúci bit vstupného sériového kódu uložený v prvom klopnom obvode sériového (posunového) registra.
Po príchode štvrtého hodinového impulzu sa logické úrovne bitov, ktoré boli postupne prítomné na jeho vstupe D0, zapíšu do klopných obvodov sériového (posunového) registra. Teraz je možné tieto bity použiť napríklad na zobrazenie na indikátoroch.
Nechajte signál prísť na vstup sériového (posunového) registra, ktorého časový diagram je znázornený na obrázku 3, potom bude stav výstupov tohto registra postupne nadobúdať hodnoty uvedené v tabuľke 1.

Obrázok 3. Časový diagram činnosti posuvného registra
Na obrázku 3 sú spolu s logickými úrovňami zaznamenané bitové hodnoty, ktoré sa prenášajú po spojovacej linke alebo sú prítomné na výstupoch posuvného registra.
| Číslo pruhu | 1 | 2 | 3 | 1 |
|---|---|---|---|---|
| Q0 | 1 | 0 | 1 | 1 |
| Q1 | X | 1 | 0 | 1 |
| Q2 | X | X | 1 | 0 |
| Q3 | X | X | X | 1 |
Ako príklad implementácie sekvenčného (posunového) registra je možné uviesť domáci mikroobvod 1564IR1 alebo zahraničný 74NS164.
jk flip-flops je možné zapínať postupne jeden po druhom, aby sa zachovala postupnosť číslic. Tento dizajn, tzv posuvný register, znázornené na obr. 13.27. Schéma dostala svoj názov na základe
Ryža. 13.27. 4-bitový posuvný register tvorený JK klopnými obvodmi zapojenými do série.
zabezpečiť, aby pri každom hodinovom impulze dostal jednu novú číslicu, posuvné predtým zapamätané číslice o jedno miesto, aby ste mohli umiestniť novú.
Tento register funguje na princípe prvý dnu prvý von(First-In First-Out, FIFO).
Uvažujme o činnosti posuvného registra znázorneného na obr. 13.27. Resetovacia linka sa najskôr nastaví na logickú 1 a potom sa vynuluje na 0. Teraz predpokladajme, že vstup dát je na začiatku 1 a že na hodinový vstup je privedená sekvencia hodinových impulzov. V tomto prípade má klopný obvod FF1 vysokú úroveň na vstupe a nízku úroveň na vstupe, takže po prvom hodinovom impulze výstup Qúroveň je nastavená vysoko. Predpokladajme, že medzitým sa vstupný signál vrátil na hodnotu 0 a zostane tak. Počas druhého hodinového impulzu sa vysoká úroveň na vstupe/klopnom obvode FF2 prenesie na jeho výstup a Q 2 nadobúda hodnotu logickej 1. Súčasne logická 0 pracuje na vstupe / klopného obvodu FF1, takže druhý hodinový impulz nastaví výstup na nízku hodnotu; Ak vstup dát zostane 0, výstup zostane nízky s každým hodinovým impulzom. Logický 1 bit sa však s každým hodinovým impulzom posúva o jeden bit ďalej, takže po štyroch impulzoch dosiahne výstup Q4. Celkovo sú teraz uložené 4 bity vstupných dát. Následné hodinové impulzy spôsobia stratu týchto údajov, zatiaľ čo novšie údaje zostanú zachované.
V posuvnom registri znázornenom na obr. 13.27 je možné, ak je to potrebné, sledovať uložené dáta v paralelnej forme, poskytujúc prístup k výstupom Q v Q2, Q3 A Q4. Tento dizajn je známy ako sériový vstup, paralelný výstup: údaje sa musia zadávať sériovo cez jediný vstup, po ktorom sú dostupné paralelne na výstupoch registra. Táto sériovo-paralelná konverzia je veľmi bežnou operáciou, ktorá sa používa napríklad na konverziu programových bitov načítaných z disku počítača na paralelný kód pre vstup do hlavnej pamäte.
Ak je každý klopný obvod vybavený okrem bežného resetovacieho vstupu aj samostatným vstupom pre nastavenie, potom je možné údaje zadávať paralelne cez tieto vstupy. Takto „načítané“ dáta je možné prijímať na výstupe Q 4 v sériovej forme pomocou hodinových impulzov. Takýto register slúži ako paralelný na sériový prevodník a často sa používa na prevod dátového výstupu z mikroprocesora, reprezentovaného signálmi vyskytujúcimi sa súčasne na veľkom počte výstupov (napríklad 16 výstupov), na sériový kód na prenos cez jeden pár vodičov do siete alebo modemu. Obľúbený dizajn, ktorý možno použiť na konverziu dát z paralelného na sériové a naopak, je univerzálny asynchrónny transceiver; obsahuje v jednom integrovanom obvode potrebné posuvné registre, riadiaci obvod a budiče pre prevádzku na linke.
Ak je v diagrame znázornenom na obr. 13.27 je výstup Q 4 prepojený s dátovým vstupom, potom dáta, ktoré možno paralelne zadávať cez vstupy inštalácie, nikdy nebudú môcť opustiť register, ale budú v ňom jednoducho cirkulovať. Tento obvod sa nazýva register s cyklický prenos alebo počítadlo krúžkov. Pomocou 10 klopných obvodov zapojených do kruhového počítadla a očíslovaných od 0 do 9 možno získať desiatkové počítadlo. Na začiatku je spúšťacie číslo 0 nastavené na stav s vysoký stupeň a zvyšok sa vynuluje. Impulzy, ktoré sa majú počítať, sa potom privedú na hodinový vstup, takže s príchodom každého vstupného impulzu sa logická 1 presunie z jedného klopného obvodu na druhý. Po deviatich impulzoch sa logická 1 zapíše do spúšťača číslo 9 a ďalší impulz obnoví počiatočný stav. Prepojenie výstupu klopného obvodu číslo 9 so vstupom ďalšieho počítadla zvonení umožní zapisovať do neho desiatky a ďalšie počítadlo zvonení bude môcť zapisovať stovky. Napriek zjavnej elegancii tohto obvodu je takmer vždy pohodlnejšie počítať binárne a potom previesť výstup binárneho počítadla na desiatkové.
Ďalšou aplikáciou prstencového merača je výmena rozdeľovača v elektronickom zapaľovacom systéme automobilu. Namiesto mechanických kontaktných bodov otvárania a zatvárania vačky na vytvorenie zapaľovacej iskry sa pomocou optického alebo magnetického snímača umiestneného na zotrvačníku motora generujú hodinové impulzy. Tu sa používa logický posun o 1 v kruhu v kruhovom počítadle, ktoré má jednu číslicu pre každý valec motora. Fáza hodinového impulzu môže byť starostlivo nastavená tak, aby sa logická 1 objavila na každom stupni presne v správnom čase na zapálenie zmesi. Korekcia predstihu zapaľovania sa tak nastavuje jednoducho a navyše po nastavení sa už nikdy nezmení, pretože nedochádza k mechanickému opotrebovaniu elektronického rozdeľovača.
Obvod posuvného registra znázornený na obr. 13.27 je možné použiť ako základ pre experimenty so všetkými typmi posuvných registrov a kruhových počítadiel. IC 74LS76 sa odporúča ako I^-flip-flop: každý mikroobvod obsahuje dva klopné obvody spúšťané zápornou hranou so samostatnými vstupmi pre nastavenie a reset. Pinout tohto obvodu je uvedený v prílohe 4.